
中大新聞網訊(通訊員諸葛盛)無人機集群可抵近觀測大范圍場景,實現多視角和大時空范圍覆蓋,在大型結構和多目標觀測方面具有獨特的優勢。傳統的無人機測繪技術的測量精度受限于無人機自身的定位精度,在現有的技術手段下對目標觀測精度只能達到厘米級。針對這一技術瓶頸,中山大學航空航天學院張小虎教授團隊提出了一種基于主動式動態基準的高精度無人機集群觀測技術,使無人機集群針對大尺度目標的測量精度達到了毫米級。
該技術已在大跨度橋梁撓度測量中得到驗證。橋梁撓度測量是橋梁運營期間結構健康監測的重要研究內容之一,可用于評估橋梁振動模態、負載情況以及潛在的結構危險。無人機集群測量橋梁撓度原理如圖1所示,搭載激光器的無人機將共面激光束投射至橋墩與橋梁待測部位建立觀測基準,觀測集群中的各無人機抵近觀測其視場內的激光點與橋梁局部特征,進一步,提取出激光光斑與橋梁特征點的圖像坐標,基于建立的觀測基準以及激光光斑相對橋梁局部特征點的坐標,修正觀測集群中的各無人機的位姿擾動誤差,最后估計得到橋梁的動態撓度值。此方法經實驗室條件下模擬橋梁驗證,測量結果均方根誤差(RMSE)小于0.5mm,并于2020年在貴州省遵義市桐梓縣土地廟二號大橋展開實際橋梁測量實驗探討了該方法在實際應用中的可行性(圖2)。

圖1 無人機集群測量橋梁撓度原理
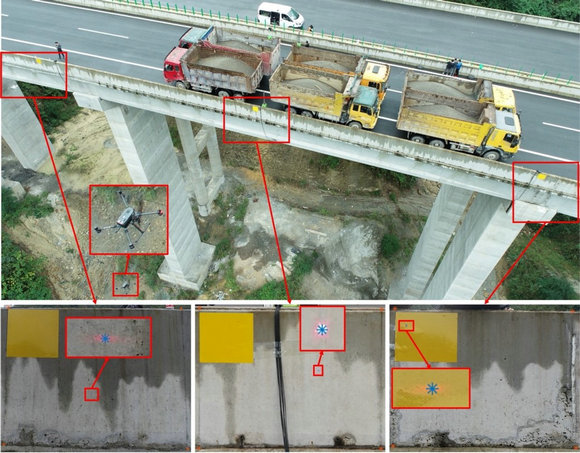
圖2 實際橋梁撓度測量場景與集群無人機視覺影像
研究成果“Non-contact Deflection Measurement for Bridge through a Multi-UAVs System”已在工程技術領域頂級期刊COMPUTER-AIDED CIVIL AND INFRASTRUCTURE ENGINEERING(中科院一區,IF=11.775)上發表。此工作由中山大學獨立完成,航空航天學院為第一單位,航空航天學院博士生諸葛盛為第一作者,張小虎教授為通訊作者。該研究在國家自然科學基金(U1734208)支持下展開。


